

Mechanism and Suppression Strategy of AC Voltage Sequential Fluctuation in Renewable Energy Base Transmitted by VSC-HVDC During Mono-polar Blocking Process
-
摘要: 大规模新能源基地经柔直送出系统作为我国未来“沙戈荒”地区新能源开发的重要方案,其在单极闭锁故障时存在交流电压序贯波动的风险。针对新能源柔直送出系统单极闭锁故障期间稳控切机、新能源降功率以及泄能电阻退出等系列扰动引起的交流系统电压序贯波动问题,研究了机理与抑制策略。首先,介绍了大规模新能源基地经柔性直流送出系统的拓扑结构,建立了适用于系统交流电压序贯波动问题分析的数学模型。然后,阐述了单极闭锁故障、泄能电阻投退、新能源切机或降功率等扰动与交流电压的时序耦合机理。在此基础上,提出了新能源降功率与泄能电阻退出相协调的交流电压序贯波动抑制策略。最后,通过PSCAD/EMTDC仿真,验证所提理论与方法的有效性。Abstract: The large-scale renewable energy base transmitted by voltage source converter based direct current (VSC-HVDC), as an important scheme for renewable energy development in the desert and Gobi areas of China in the future, which has the risk of AC voltage sequential fluctuation in case of mono-polar blocking failure. This paper investigates the mechanism and suppression strategy of the AC voltage sequential fluctuation caused by a series of disturbances, such as renewable energy cutting or power reduction and energy-consuming resistor casting back during the mono-polar blocking process of renewable energy bases transmitted by VSC-HVDC. Firstly, the topology of large-scale renewable energy base transmitted by the VSC-HVDC system is introduced, and the mathematical model, which applies to the analysis of the system AC voltage sequential fluctuation problem, is established. Then, the generalized disturbances such as mono-polar blocking fault, energy-consuming resistor casting off, renewable energy cutting or power reduction, and the time-sequence coupling mechanism of AC voltage are elaborated. The AC voltage sequential fluctuation suppression strategy is proposed on this basis, coordinated with renewable energy power reduction and energy-consuming resistor withdrawals. Finally, the effectiveness of the proposed theory and method is verified by PSCAD/EMTDC simulation.
-
0. 引言
在“力争2030年前实现碳达峰、2060年前实现碳中和”战略目标驱动下,大力发展以风电、光伏为代表的新能源成为我国能源转型的必然选择[1]。2022年6月,国家发展改革委、国家能源局联合印发的《“十四五”可再生能源发展规划》指出要加快推进沙漠、戈壁、荒漠地区为重点的大规模新能源发电基地建设[2]。新能源发电基地由于大多集中在三北地区和西南地区,距离长三角和珠三角等东部电力负荷中心达1000~3500 km,需要通过特高压直流输电实现电力外送[3]。
目前新能源机组大多采用跟网型的最大功率跟踪控制,需要较强的支撑电源才能运行[4]。而沙漠、戈壁和荒漠地区地理位置偏远,新能源基地的本地常规电源少、电网薄弱,系统处于无支撑或弱支撑状态。基于模块化多电平换流器(modular multilevel converter,MMC)的柔性直流输电技术,因其具有构网运行能力,可以为新能源提供电压频率支撑[5],被广泛运用于海上风电[6-7]以及陆上新能源孤岛[8]送出场景。因此,大规模新能源基地经柔性直流送出系统(后文简称“新能源柔直送出系统”)将成为我国沙戈荒地区新能源开发的典型形态[9]。
对于高压直流输电系统而言,单极闭锁是常见的故障之一。直流线路故障、换流站故障及交流系统故障等均可能导致直流系统发生单极闭锁[10]。由于送端新能源基地没有与大电网交流互联,单极闭锁后故障极功率送出受阻,送端电网短时间内会出现数千兆瓦的功率盈余。文献[11-12]研究了柔直系统盈余功率问题的机理,分析了盈余功率与送端直流系统过电压之间的关系。研究表明单极闭锁后若不及时采取措施,大量盈余功率会涌入MMC健全极换流站,导致直流系统出现严重的过电压,进而威胁整个送端电网的安全稳定。然而由于常规的稳控切机动作时间以及新能源快速功率控制的响应时间均为百毫秒级[13-14]。因此,送端换流站交流母线需要配置交流泄能电阻,单极闭锁发生后,送端交流母线处泄能电阻迅速投入,以平衡掉故障极的盈余功率。
送端换流站单极闭锁故障发生及交流泄能电阻投入后,文献[15]采用了稳控装置集中切机,集中退出交流泄能电阻的单极闭锁故障穿越方案,能够有效解决新能源孤岛方式下的功率盈余问题;文献[16]提出了一种集中切机,分组退出交流泄能电阻方案,有效提高了功率盈余工况下的故障穿越能力;文献[17]提出了风电场降功率控制及其与泄能电阻的协调配合方案,可减少风电机组的切除。
现有研究表明送端柔直换流站单极闭锁后通过投入交流泄能电阻可以实现盈余功率的快速平衡,随后在与稳控切机、新能源降功率等手段配合下即可实现故障的穿越。然而,现有研究尚未关注稳控切机、新能源降功率以及泄能电阻退出等系列扰动对系统交流电压的影响。实际仿真发现,即使PI控制器参数设置合理,稳控切机、新能源降功率以及泄能电阻退出等系列扰动依然会引起送端系统交流电压的序贯波动,具体表现为送端交流系统会伴随系列扰动交替出现低电压和过电压。即多扰动下送端系统交流电压的序贯波动特性属于新能源基地经柔直送出系统的固有特性。这将对新能源场站和电力系统的安全稳定运行带来较大威胁[18]。
在此背景下,本文针对新能源柔直送出系统单极闭锁故障期间稳控切机、新能源降功率以及泄能电阻退出等系列扰动引起的交流系统电压序贯波动问题进行研究。首先,介绍了大规模新能源经柔性直流送出系统的拓扑结构,建立了适用于交流系统电压序贯波动问题分析的MMC的交流侧动态模型及VF(定电压/频率)控制器数学模型。然后,针对单极闭锁故障、泄能电阻投退、新能源切机/降功率等扰动与交流电压的时序耦合机理进行了分析,揭示了多扰动下送端系统交流电压序贯波动的产生机制。接着,提出了新能源降功率与泄能电阻退出相协调的交流电压序贯波动抑制方法,以缓解系统单极闭锁过程中送端系统交流电压的序贯波动。最后,基于PSCAD/EMTDC搭建仿真模型,验证了所提理论和方法的有效性。
1. 系统结构与数学模型
1.1 系统结构与总体控制
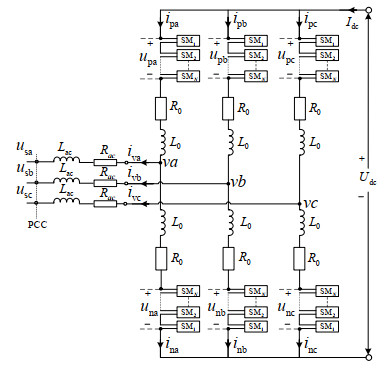
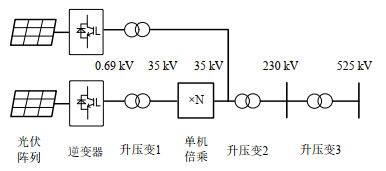
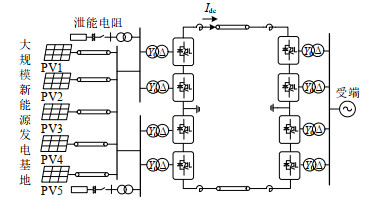
大规模新能源经柔性直流送出系统的基本结构如图 1所示。送端电网为大规模纯新能源发电基地。新能源发电基地包括5个新能源发电集群,各新能源发电集群经交流线路连接到送端柔直换流站交流母线,送入送端换流站的功率为10000 MW。柔性直流输电系统采用双极拓扑,正极和负极换流器并联在交流母线上,每一极换流站均由2个换流器串联。每极换流站交流母线上并联有10组500 MW的交流泄能电阻。受端电网为强交流电网。
![]() 图 1 大规模新能源基地经柔性直流送出系统示意图Figure 1. Schematic diagram of large-scale renewable energy base transmission by VSC-HVDC
图 1 大规模新能源基地经柔性直流送出系统示意图Figure 1. Schematic diagram of large-scale renewable energy base transmission by VSC-HVDC所有新能源均采用跟网型的最大功率跟踪控制。送端柔性直流换流站采用VF控制,为送端电网构建交流电压与频率。受端柔性直流换流站采用定直流电压控制,维持直流系统的直流电压。
1.2 MMC的交流侧动态模型
MMC的拓扑结构如附录A中图A1所示。换流阀采用三相六桥臂结构,每个桥臂由桥臂电抗器L0、桥臂电阻R0与若干子模块(submodule module,SM)串联而成。图中:usj(j=a、b、c,表示abc三相)表示MMC交流电网公共连接点(point of common coupling,PCC)的三相电压,ivj表示MMC输出电流;urj和irj(r=p、n,表示上下桥臂)分别是MMC的j相r桥臂上的电压和电流;Lac和Rac分别表示MMC连接变压器的等值电感和等值电阻。
在系统平衡的条件下,根据基尔霍夫电压定律可得MMC桥臂电压方程[5]为
usj+Lacdivjdt+Racivj+L0dipjdt+R0ipj+upj=udc2 (1) usj+Lacdivjdt+Racivj−L0dinjdt−R0inj−unj=−udc2 (2) 将式(1)和式(2)相加并结合基尔霍夫电路定律化简,可得表征MMC交流侧动态电路特性的方程:
usj=−Leqdivjdt−Reqivj+uvj (3) 式中:uvj表示MMC的j相输出电压;Leq和Req分别为系统的交流侧等效电感和交流侧等效电阻,它们的表达式分别为
uvj=unj−upj2 (4) Leq=Lac+L02 (5) Req=Rac+R02 (6) 对式(3)所示的三相方程进行派克变换,可得dq坐标系下MMC的交流侧电路动态特性的方程为
[usdusq]=−Lddt[isdisq]−[−ReqωLeq−ωLeq−Req][isdisq]+[uvduvq] (7) 式中:usd和usq分别为PCC母线电压的d轴和q轴分量;isd和isq分别为MMC输出电流的d轴和q轴分量;ω表示同步旋转角速度。
根据瞬时功率理论[19-20],MMC注入交流侧的有功功率PMMC的大小为
PMMC=32Usmisd (8) 式中:Usm为逆变侧交流母线相电压幅值。
式(7)和式(8)即表征MMC交流侧动态电路特性和动态功率特性的核心方程。
1.3 MMC的VF控制器数学模型
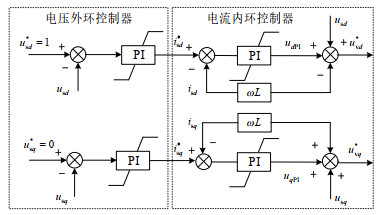
VF控制器的基本结构如图 2所示,它由电压外环控制器和电流内环控制器2部分组成,其基本原理为MMC通过电压外环控制器调节电流内环控制器的电流指令值,进而调节MMC的输出电压d轴和q轴分量,最终实现维持交流母线电压恒定的控制目标。图中:u∗sd、u∗sq分别表示MMC的PCC交流电压d轴和q轴分量的指令值;i∗sd、i∗sq分别表示MMC输出电流的d轴和q轴分量的指令值;udPI、uqPI分别表示d轴和q轴电流环的PI输出值;u∗vd、u∗vq分别表示MMC的输出电压d轴和q轴分量的指令值。
电压外环控制器的数学模型可表示为
{i∗sd=kPd1(u∗sd−usd)+kId1∫(u∗sd−usd)dti∗sq=kPq1(u∗sq−usq)+kIq1∫(u∗sq−usq)dt (9) 式中:kPd1、kId1、kPq1、kIq1分别代表电压外环d轴和q轴PI控制器的比例系数和积分系数。
电流内环控制器的数学模型可表示为
{udPI=kPd2(i∗sd−isd)+kId2∫(i∗sd−isd)dtuqPI=kPq2(i∗sq−isq)+kIq2∫(i∗sq−isq)dt (10) 式中:kPd2、kId2、kPq2、kIq2分别代表电流内环d轴和q轴PI控制器的比例与积分时间常数。
通过内外环控制器的控制,即可得到MMC输出电压指令值:
{u∗vd=usd+udPI−ωLeqisqu∗vq=usq+uqPI+ωLeqisd (11) 式(11)生成的u∗vd、u∗vq通过限幅环节后再进行Park反变换即可生成MMC的调制波。式(9)—(11)即构成了表征MMC的VF控制器的核心方程。
2. 单极闭锁交流电压序贯波动机理
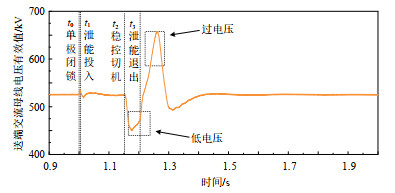
对于图 1所示的系统,当t0时刻送端换流站发生单极闭锁故障,送端换流站迅速(t1时刻)投入交流泄能电阻。参照现有的故障处理策略,新能源场站侧稳控装置在t2时刻收到送端换流站传来的单极闭锁信号,迅速切除一半的新能源机组或通过Δtd时间将功率降低至一半,待切机或降功率完成后,t3时刻泄能电阻退出,过渡到故障后新的稳态。
然而,基于仿真分析发现,送端换流站的交流电压在该过程中会发生序贯波动,呈现出低电压和过电压交替出现的形态。图 3展示了单极闭锁过程中送端换流站的交流电压,该图来源于第4部分的算例仿真。由图 3可以看出,在t2时刻新能源切机到t3时刻之间,交流母线出现低电压,在t3时刻泄能电阻开始退出后,交流系统出现过电压。
本节针对单极闭锁故障期间各类扰动与交流电压的时序耦合机理进行研究,以单极闭锁前MMC满功率运行状态为例,分析单极闭锁交流电压序贯波动的形成机制。
2.1 新能源切机/降功率前的过程分析
t0时刻前系统处于稳态运行状态,新能源基地发出的功率全部注入送端MMC换流站。MMC换流站的输出电流由送端所有新能源场站汇入换流站的总功率决定。d轴电流isd维持在额定值,q轴电流isq维持在0。PCC交流电压由MMC的控制器决定,控制器通过调节uvd和uvq,使得usd保持为1、usq保持为0。
t0时刻送端MMC换流站发生单极闭锁后,MMC故障极的功率迅速降低到0。t1时刻,泄能电阻根据控制系统指令迅速投入,其有功功率从0快速升高到额定值。在泄能电阻支路功率增长到自身额定功率之前,MMC故障极的部分盈余功率会转移至MMC健全极中,使得MMC健全极的直流电压出现一定程度的上升。由于泄能电阻投入非常迅速,该过程中能量基本保持平衡,该过程对交流电压的影响可以忽略。
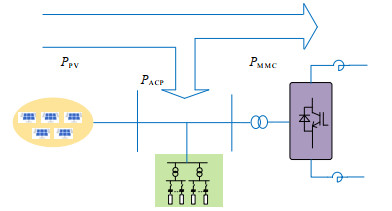
当泄能电阻功率上升至其额定功率时,MMC故障极功率就完全转移至泄能电阻支路中。此时,送端电网的功率流向如图 4所示,送端电网功率关系满足:
![]() 图 4 单极闭锁时送端电网功率流向Figure 4. Power flow diagram of the grid at the sending end during mono-polar blocking process
图 4 单极闭锁时送端电网功率流向Figure 4. Power flow diagram of the grid at the sending end during mono-polar blocking processPPV=PACP+PMMC (12) 式中:PPV表示送端新能源基地注入换流站交流母线的总功率;PACP表示泄能电阻支路消耗的功率;PMMC表示注入送端MMC健全极换流站的功率。此时,对于MMC健全极换流站而言,式(7)各变量基本保持不变,交流电压仍维持在稳态值。
2.2 新能源切机/降功率过程分析
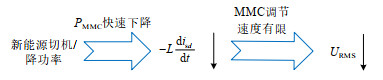
当采用新能源切机方案时,t2时刻稳控装置切除一半新能源机组,新能源基地注入换流站交流母线的总功率PPV迅速降低一半。由于泄能电阻消耗的功率决定于其端电压与阻值,切机瞬间,泄能电阻支路消耗的功率PACP近似保持不变。因此,新能源基地有功功率的减小将主要由MMC健全极承担,注入送端MMC健全极换流站的功率PMMC短时间内会迅速降低。与此同时,注入送端MMC健全极换流站的有功电流−isd迅速减小。根据式(7)可知,此时−Ldisd/dt相较于稳态变成一个较大的负值,usd会有所降低。当MMC的控制系统检测到交流电压下降后,会通过外环、内环控制器分别调节isd和uvd使得交流电压恢复至稳态值。然而,现有研究表明[21-22],MMC外环控制器的时间尺度为百毫秒级,内环控制器的时间尺度为十毫秒级。因而,在功率迅速降低的过程中,受限于MMC控制系统的响应速度,有功电流isd难以迅速跟踪注入送端MMC换流站功率PMMC的变化,uvd无法迅速将usd调节至指令值,usd将持续降低,送端系统会出现持续的低电压。
当采用新能源降功率方案时,t2时刻后随着新能源场站功率的快速下降,注入送端MMC健全极换流站的功率PMMC和有功电流−isd快速减小。新能源降功率的速度影响了单极闭锁期间注入MMC健全极有功电流的变化速度,进而影响了−Ldisd/dt的大小。同上述分析,当新能源降功率带来的有功电流下降的速度超出MMC控制系统的调节速度时,交流母线电压就会出现一定的降低。图 5展示了上述分析中低电压的产生机理。
在新能源切机/降功率结束后,送端新能源基地注入换流站交流母线的总功率PPV降低至一半。同时,由于送端换流站交流母线电压的降低,泄能电阻支路消耗的功率PACP会有所减小,该部分减小的功率即新能源切机/降功率后仅存的注入送端MMC健全极换流站的功率。
2.3 新能源切机/降功率结束后的过程分析
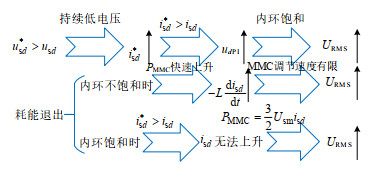
当新能源切机/降功率结束后,新能源基地注入送端换流站交流母线的总功率PPV将基本不再变化。随着泄能电阻的退出,原本由泄能电阻支路消耗的功率将迅速转移至送端MMC健全极换流站。在该过程中由于内环控制器饱和以及泄能电阻的快速退出,送端换流站交流母线会出现过电压。本节将结合控制系统的动态作用过程以及功率平衡关系分析交流系统过电压的产生机制。
根据2.2节的分析,新能源切机/降功率会给送端交流系统造成持续的低电压。随着新能源降功率过程的结束,内环电流实际值isd将基本不再变化。而由于交流母线电压的降低,d轴电压实际值usd仍小于d轴电压指令值u∗sd,根据式(9)可知,在MMC外环控制器的作用下,内环电流指令值i∗sd仍将不断上升直至反向,导致指令值i∗sd大于实际值isd。根据式(10)可知,在MMC内环控制器的作用下,内环d轴控制器输出值udPI不断升高,直至其积分器达到饱和。与此同时,根据式(11),MMC输出电压的参考值u∗vd也将不断增高直至超过其稳态值,达到其限幅环节的上限。
在新能源场站完成降功率后,由于d轴电压实际值usd仍小于d轴电压指令值u∗sd,根据式(9)—(11)可知,在外环控制器的作用下内环电流指令值i∗sd仍将继续上升,内环PI控制器输出值udPI依然维持在限幅值上限,MMC输出电压的参考值u∗vd依然大于其稳态值。然而,由于新能源降功率过程的结束,注入MMC的电流−isd不再减小,−Ldisd/dt由新能源降功率期间较大的负值变为0,MMC输出电压的参考值u∗vd将超出d轴电压实际值usd。因此,根据式(7),送端换流站交流电压将在u∗vd的调节下从最低点开始快速上升。当usd升高到等于u∗sd时,由于外环控制器的积累,i∗sd依然远大于isd,d轴内环控制器仍保持在饱和状态,u∗vd依然大于其稳态值。因此,送端交流母线电压将继续上升,系统开始出现过电压。随着usd大于u∗sd,i∗sd将在电压外环控制器的调节下逐渐降低,当i∗sd减小至小于isd且isd在控制器调节下开始逐渐下降时,usd达到最大值。此后,在控制器的调节作用下交流电压逐步恢复至稳态值。以上即新能源切机/降功率引起的内环控制器饱和与交流系统过电压的产生机制。
泄能电阻快速退出过程伴随的功率不平衡是交流系统过电压的另一重要原因。下面根据内环控制器是否进入饱和分别阐述泄能电阻的快速退出对交流过电压的作用机制。
1)当内环控制器未处于饱和状态时:伴随泄能电阻的退出,新能源基地注入送端健全极换流站有功功率和有功电流会快速升高。根据式(7)可知,−Ldisd/dt相较于稳态变成一个较大的正值,usd会有所升高。当MMC控制系统检测到交流电压升高后,会通过外环、内环控制器分别调节isd和uvd来使得交流电压恢复至稳态值。然而,受限于MMC控制系统的响应速度,有功电流isd难以迅速跟踪到注入送端MMC换流站功率PMMC的变化,uvd无法迅速将usd调节至指令值,送端换流站交流母线会出现一定的过电压。
2)当内环控制器处于饱和状态时:根据前述分析,送端换流站的交流母线电压将在内环控制器的作用下不断上升。随着泄能电阻的退出,原本由泄能电阻所消耗的功率将逐步转移至MMC健全极换流站。然而,由于内环控制器的饱和,在控制系统的作用下注入MMC健全极换流站的有功电流−isd无法快速上升。根据式(8)所示的MMC的瞬时功率方程,此时泄能电阻功率的转移只能由Usm的增加来承担。因此,在不平衡功率的作用下,送端换流站交流母线过电压会出现一定的过电压。
图 6对上述分析中过电压的产生机理进行了总结,归纳了由内环控制器饱和与泄能电阻快速退出引发的送端系统过电压的作用机制。
2.4 关键参数影响分析
由于式(7)—(11)构成了复杂的微分代数方程组,难以求得解析解。本文对上述模型进行一定的简化,将其转化为代数方程进行近似估算。考虑到送端MMC换流站作为送端交流电网的平衡节点,在理想情况下其控制系统会通过调节MMC内环电流的实际值isd跟踪注入MMC换流站的有功功率PMMC,使得isd与PMMC的标幺值相等。因此,为考虑MMC内外环控制时间尺度的限制[21-22],近似估算中可假设内环电流的实际值isd滞后于注入MMC有功功率PMMCΔt(单位ms),即isd(t)=PMMC(t−Δt)。联立式(8)与式(12),并进行标幺化可得:
u2sd(t)RACP+usd(t)isd(t)−PPV(t)=0 (13) 式中:RACP为泄能电阻支路的等值电阻。在新能源降功率和泄能电阻退出过程的任意时刻,PPV(t)、isd(t)、RACP这3个参数均为已知量,式(13)都是关于usd(t)的一元二次方程,可直接通过求根公式进行求解。求解得到usd(t)后,再根据注入MMC换流站的功率PMMC(t)更新MMC的电流指令值,即可完成当前步长下交流电压usd的近似估算。
2.4.1 新能源降功率速度的影响
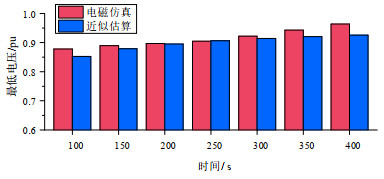
针对图 1所示典型系统,通过电磁暂态仿真和近似估算2种方式,模拟单极闭锁时送端新能源基地通过不同时间从满功率线性降低到一半功率的情景,分析新能源降功率速度与电压跌落程度之间的关系,所得结果如附录A中图A2所示。
由图A2可以看出,电磁仿真和近似估算2种方式得到的结果基本接近。新能源功率降低速度越慢,注入MMC健全极有功电流的变化速度越慢,MMC控制系统调节时间越充裕,系统电压跌落程度越小;新能源功率降低速度越快,注入MMC健全极有功电流的变化速度越快,MMC控制系统调节时间越短暂,系统电压跌落程度越大。此外,根据图A2中电磁暂态仿真所得的结果,以柔直换流站满功率作为1 pu,当新能源降功率所用时间在200 ms以内(即2.5 pu/s以上)时,送端电压最低会降低到0.9 pu以下,新能源场站将会随之发生大规模的低穿;当降功率所用时间在300 ms以外(即1.6 pu/s以下)时,系统电压降低幅度将不再明显。上述分析表明,新能源场站需要以较慢的速度降功率,才能避免送端换流站母线电压大幅度跌落。
2.4.2 泄能电阻退出速度的影响
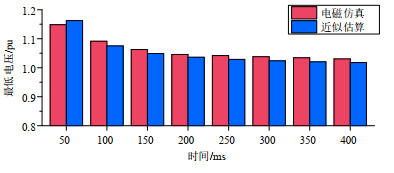
针对图 1所示典型系统,通过电磁暂态仿真和近似估算2种方式,模拟送端柔直换流站泄能电阻通过不同时间段分组退出的情景,分析在不考虑控制器饱和的影响时,泄能电阻退出速度与交流系统电压升高程度之间的关系,所得结果如附录A图A3所示。
由图A3可以看出,电磁仿真和近似估算2种方式得到的结果基本接近。泄能电阻退出速度越慢,注入MMC健全极有功电流的变化速度越慢,MMC控制系统调节时间越充裕,系统电压升高程度越小;泄能电阻退出速度越快,注入MMC健全极有功电流的变化速度越快,MMC控制系统调节时间越短暂,系统过电压程度越大。此外,根据图A3中电磁暂态仿真所得的结果,以柔直换流站满功率作为1 pu,当泄能电阻退出所用时间在100 ms以内(即5 pu/s以上)时,送端电压最高会升高到1.1 pu以上,新能源场站将会随之发生大规模的高电压穿越;当泄能电阻退出所用时间在200 ms以外(即2.5 pu/s以下)时,送端最高电压不会超过1.05 pu,且系统电压上升幅度随泄能电阻退出时间的变化也不再明显。上述分析表明,泄能电阻需要以较慢的速度分组退出,才能避免送端系统出现明显的过电压。
2.4.3 MMC内环控制器的饱和特性分析
根据2.3节分析,单极闭锁期间持续的低电压会导致外环控制器输出的指令值i∗sd变化过大,进而引发内环控制器的饱和。本节将分析MMC外环控制器的PI参数、外环输出量i∗sd的限幅值以及PI控制器的结构对i∗sd的变化程度和内环控制器饱和特性的影响。
低电压过程中由外环积分器贡献的Δi∗sd可表示为
Δi∗sd=kId1∫t1+Δtlowt1(u∗sd−usd)dt (14) 式中:t1表示新能源开始切机或者降功率的时刻;Δtlow表示从开始降功率至泄能电阻开始退出之间低电压过程持续的时间;kId1表示外环积分器积分时间常数。由式(14)可以看出,kId1将影响扰动带来的Δi∗sd的大小。当kId1较大时,单极闭锁过程期间MMC控制系统响应速度更快,但容易发生饱和;当kId1较小时,单极闭锁过程期间MMC控制系统响应速度稍慢,但不易发生饱和。考虑到对于特高压直流输电的交流系统而言,过电压的危害相较于低电压更大。因此,在单极闭锁故障期间必要时可以通过减小外环积分器积分时间常数甚至冻结外环积分器来避免积分器的饱和。
此外,内环电流指令值i∗sd与实际值isd的差值是影响内环PI控制器饱和特性的关键。由于PI控制器限幅环节一般设置为±imax,在单极闭锁过程中,外环控制器输出的指令值i∗sd在控制系统的调节下可能会变到相反方向。此时,内环电流指令值i∗sd将会远大于实际值isd,从而大幅加剧内环控制器的饱和。因此,为避免单极闭锁期间i∗sd上升过大,故障期间可适当减小单极闭锁故障期间i∗sd的限幅值。
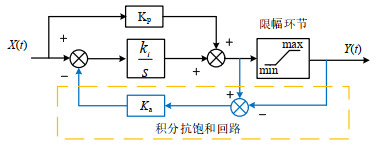
最后,为避免积分器进入深度饱和,PI控制器可改造为如附录A中图A4所示的积分抗饱和控制结构[23]。该结构相较于常规的PI控制器增加了一条积分抗饱和的反馈控制回路,将限幅环节输入信号与输出信号的差值反馈到积分控制器的输入中。该回路在PI控制器未进入饱和时不起作用,在PI控制器进入饱和后可通过反馈控制避免积分器进入深度饱和状态,进而减小系统的过电压。
3. 单极闭锁交流电压序贯波动的抑制策略
3.1 基本原理
根据上述分析,送端系统低电压的原因在于送端新能源大规模切机/快速降功率造成的注入送端MMC健全极换流站有功功率的快速降低。过电压的原因在于新能源切机/降功率期间低电压带来的d轴内环控制器饱和以及泄能电阻的快速退出。
因此,解决交流系统电压序贯波动的核心思路在于尽可能降低新能源切机/降功率以及泄能电阻退出等多个扰动过程带来的注入MMC健全极换流站的有功功率和有功电流的变化。
3.2 受端电网功率缺额的约束
为避免交流系统电压发生序贯波动,一种最容易想到的方法是用较慢的速度降低新能源场站的功率,且在各组泄能电阻的退出之间保证足够的时间间隔。然而,该方法可能会导致泄能电阻因长时间投入而烧毁。
此外,该方法也会导致受端功率出现较大的缺额。柔性直流单极额定功率记作Pe,注入送端MMC换流站的功率记作PMMC。在换流站发生单极闭锁的t0时刻到新能源场站降功率前的t1时刻之间,PMMC大小等于Pe,受端交流系统承受的功率缺额ΔP大小为Pe;在t1时刻到泄能电阻退出前的t2时刻之间,PMMC的大小从Pe逐渐减小至0,ΔP的大小从Pe逐渐增加至2Pe;t2时刻至泄能电阻完全退出后到系统恢复稳态的t3时刻,PMMC的大小从0逐渐增加至Pe,ΔP的大小从2Pe逐渐恢复至Pe。该过程中,受端系统总的能量缺额ΔE可表示为
ΔE=Pe(t2−t1)+∫t3t2(2Pe−PMMC)dt (15) 式中:t2时刻由于新能源功率完全由泄能电阻消耗,受端交流系统将承受2倍的功率缺额,相当于直流系统发生双极闭锁。根据电力系统安全稳定导则第二级安全稳定标准的要求[24],此时受端电网可能会采取切机切负荷等稳定控制措施,受端电网的安全稳定将受到冲击。因此,新能源降功率过程与泄能电阻退出过程不能分隔开,二者需要协调配合。
3.3 时序配合逻辑
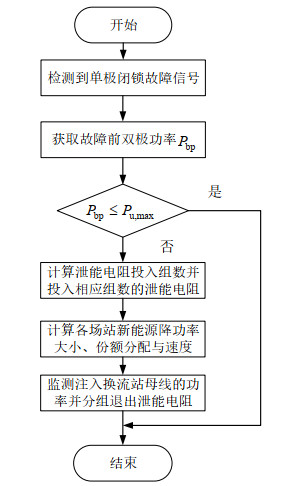
本节以单极闭锁期间注入健全极换流站有功电流变化幅度小、受端传输功率缺额少、泄能电阻投入时间短为目标,提出了降功率与泄能电阻退出协调配合控制策略,方法的详细流程如附录A图A5所示。其基本思路为新能源每降低1组泄能电阻所消耗的功率,泄能电阻就退出1组。这样则可使得新能源降功率带来的扰动与泄能电阻退出造成的扰动互相抵消,使得注入健全极换流站的有功功率和有功电流一直保持在稳态值附近,同时保证了受端系统功率缺额仅为单极传输的功率。
步骤1:计算泄能电阻的投入组数。送端换流站发生单极闭锁时,根据故障前双极功率Pbp与健全极所能传输的最大功率Pu,max的关系,确定泄能电阻的投入组数N。当Pbp小于Pu,max时,不投入泄能电阻,通过健全极功率转带实现故障穿越;当Pbp大于Pu,max时,则采用过投入的方式投入泄能电阻。组数N可表示为
N={0,Pbp≤Pu, max ⌈Pbp−Pu,maxP0⌉,Pbp>Pu, max (16) 式中:⌈⋅⌉表示向上取整符号;P0表示单组泄能电阻消耗的功率。
步骤2:计算送端新能源电网降功率的大小以及各新能源场站降功率分配的份额。送端新能源电网应降低的总功率为(Pbp−Pu,max)。为保证各场站降功率的公平性,各新能源场站根据其初始运行功率的大小按比例分配降功率的份额。具体为
Pde−i=Pire∑ni=1Pire(Pbp−Pu,max) (17) 式中:Pde−i为第i个新能源场站分配的降功率大小;Pire为第i个新能源场站的初始运行功率。
步骤3:计算送端新能源电网降功率的速度。考虑泄能电阻投入时间尽可能短这一目标,新能源降功率速率的时间主要基于泄能电阻投退的时间约束来确定。
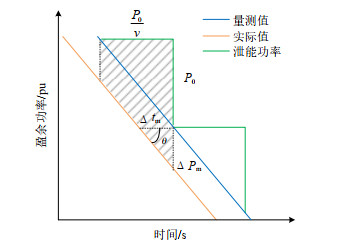
首先,由于泄能电阻是根据注入送端换流站功率的大小来退出的,功率信号为本地信号,而量测仪表在量测功率时会存在如图 7所示的Δtm的时间延迟,Δtm约为5 ms左右。因此,功率的量测值与实际值之间会存在ΔPm的差值。其中ΔPm与Δtm的关系可表示为
![]() 图 7 盈余功率实际值、测量值之间的关系示意图Figure 7. Schematic diagram of the relationship between actual and measured values of surplus power
图 7 盈余功率实际值、测量值之间的关系示意图Figure 7. Schematic diagram of the relationship between actual and measured values of surplus powerΔPm=Δtmtanθ (18) 式中:tanθ在数值上等于新能源降功率的速度。
在每组泄能电阻退出前的时刻,功率缺额取得最大值ΔPmax,即
ΔPmax=ΔPm+P0 (19) 因此,为减小注入换流站的功率缺额,ΔPm应小于单组泄能电阻消耗的功率的1/4,因此新能源降功率的速度应小于:
vcri1=tanθcri=P04Δtm (20) 此外,根据2.4节分析,当不考虑内环控制器饱和时,泄能电阻退出速度越慢,所引起的电压上升程度越小;当泄能电阻退出速度小于某一临界值vcri2后,系统电压上升幅度会维持在5%以内且不再随泄能电阻退出速度发生明显变化。对于特定的系统,vcri2的大小是确定的,可以通过仿真等手段获得。因此,从泄能电阻投入时间尽可能短的角度考虑,新能源降功率的速度v的最大值为
vmax=min{vcri1,vcri2} (21) 最后,考虑能量缺额时,相邻2组退出的泄能电阻之间送端换流站缺额功率ΔES的大小可近似表示为图 7中梯形阴影所示的面积:
ΔES=12(2ΔPm+P0)P0v (22) 对于特定的系统,量测误差造成的ΔPm、以及单组泄能电阻的容量P0都是确定的,ΔES的大小只与新能源降功率的速度v有关,ΔES会随着v的增加而减少。因此,为保证ΔES尽可能小,新能源降功率的速度v应取为最大值vmax。
步骤4:集控中心给各新能源场站下达降功率的指令,并实时监控注入换流站交流母线的有功功率,每当检测到新能源基地降低1组泄能电阻所消耗的功率,泄能电阻就退出1组。
4. 算例分析
4.1 测试算例系统
本节在仿真软件PSCAD/EMTDC中搭建了电磁暂态仿真模型,对大规模新能源基地经柔性直流送出系统的单极闭锁故障进行仿真,验证理论分析的正确性和控制方法的有效性。
测试系统如图 1所示,送受端换流站均采用双极结构。5个不同位置的大型光伏发电基地各自通过一条长度为50 km的交流输电线路将功率汇集至送端换流站。受端为无穷大电网。测试系统的具体参数如附录A表A1所示,仿真步长为50 μs。
为充分保留光伏单元的基本特性,光伏场站采用附录A中图A6所示的建模方式。每个光伏场站由一台光伏单机模型与其余光伏的等值模型并联组成。等值模型采用单机倍乘方式,光伏阵列发出的直流电通过光伏逆变器逆变为0.69 kV的交流电,然后经升压变压器升压至35 kV。光伏场站在35 kV侧通过单机倍乘,然后经两级升压变依次升压至230、525kV,最终汇入送端主网。经输电网损耗后,新能源基地汇入送端换流站的有功功率共10000 MW。其中,光伏场站PV1、PV2、PV3共5000 MW,光伏场站PV4、PV5共5000 MW。
初始时送受端换流站均双极运行。1.0 s时,送端换流站负极检测到故障闭锁。以下分别针对现有的2种故障处理方案以及本文所提出的故障处理方案进行仿真分析。
4.2 测试结果分析
1)方案1,稳控集中切机方案。
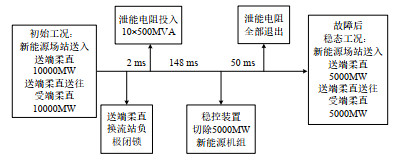
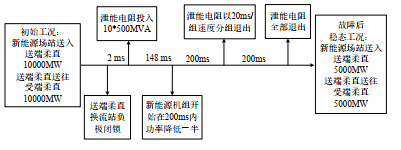
稳控切机作为目前最为常用的技术方案[15],已在张北柔直工程中得到应用,其典型的时序配合逻辑如附录A中图A7所示。1.0 s时,送端换流站单极闭锁。1.002 s时,送端换流站投入5000 MW交流泄能电阻。1.15 s时,新能源场站侧稳控装置接收到单极闭锁信号,于光伏场站1、光伏场站2、光伏场站3的并网点切除共计5000 MW新能源机组。1.2 s时,控制系统集中退出所有交流泄能电阻。
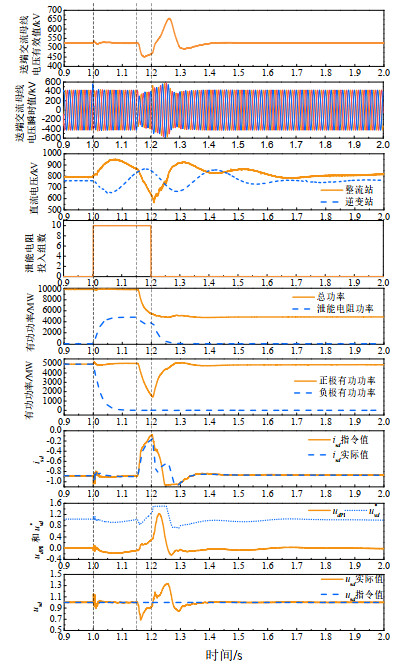
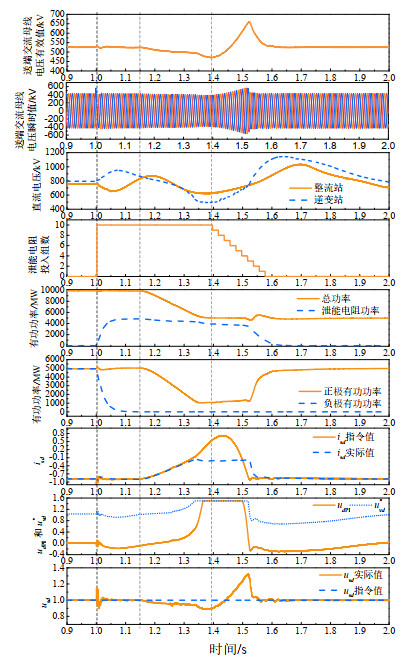
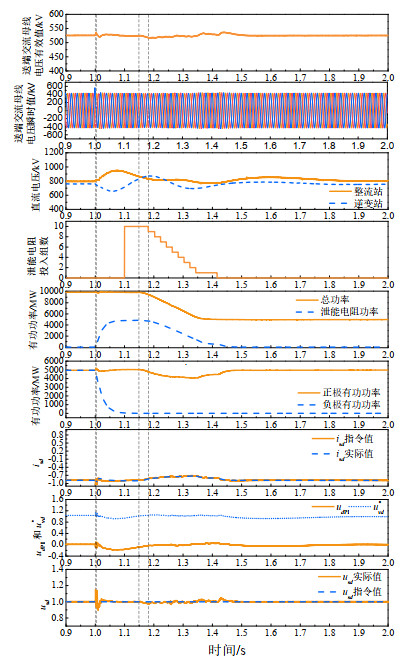
采用稳控切机方案时的仿真结果如附录A中图A8所示,图中各虚线依次表示单极闭锁、泄能电阻投入、稳控切机、泄能电阻退出等各扰动发生的时间(下同)。当送端换流站负极发生闭锁后,其有功功率迅速降低到0,此时由于泄能电阻的迅速投入,光伏场站的盈余功率得以平衡,送端换流站正极有功功率和交流母线电压基本不受影响。1.15 s时,新能源场站处的稳控装置切除5000 MW有功功率,流入健全极换流站的有功电流迅速下降。受限于MMC控制器的响应速度,控制系统无法迅速将usd调节至指令值,usd迅速下降。由图A8可以看出,送端换流站母线电压最低会降到450 kV,出现明显的低电压现象。1.2 s时泄能电阻退出,此时泄能电阻的功率迅速转移至健全极换流站,送端交流母线电压不断上升,最高会升高到660 kV。整个过程中交流母线电压先降低后升高,呈现出典型序贯波动的特征。此外,由图A8可以看出,由于泄能电阻的存在,注入送端换流站健全极的功率会低于健全极的额定功率,叠加单极闭锁故障的影响,受端系统将承受最高8600 MW的功率缺额,这对受端电网的频率会造成一定的冲击。
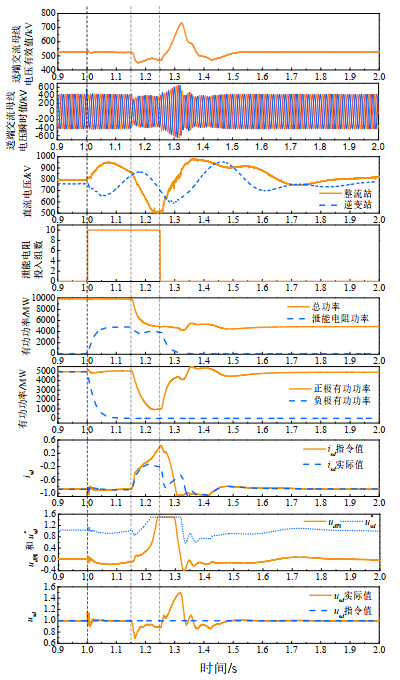
在实际工程中,由于各输电线路长度、通信设备的不同以及断路器自身动作速度的差异,导致实际的切机完成时间并不是确定的,会存在几十毫秒的时间误差区间。考虑到目前新能源基地规模越来越大,沙戈荒地区传输线路越来越长,这一误差区间更加不可忽视。本部分在上述稳控切机方案的基础上,将稳控切机与泄能电阻退出之间的时间间隔修改为100 ms,其余扰动的时序不变,分析稳控切机与泄能电阻退出之间时间间隔对交流电压的影响。仿真的结果如附录A图A9所示。可以看出,在泄能电阻退出后送端换流站交流母线电压将达到730 kV。对比图A8可知,这是由于在切机结束到泄能电阻退出之间,d轴内环电流控制器输出值udPI不断上升、控制器进入了饱和状态所致。此时在控制器饱和与泄能电阻快速退出的双重作用下,送端交流母线会出现更为严重的过电压。
此外,值得说明的是,本文虽然是针对本拓扑送端换流站单极闭锁进行研究的,但当受端换流站单极闭锁时,分析送端交流电压的变化也是同样适用的。附录B对此进行了详细论述。
2)方案2,新能源降功率方案。
根据现有技术水平新能源场站在接受到上级调度指令后在100 ms内即可完成降功率[25]。目前已有研究提出了将新能源快速降功率应用到单极闭锁故障中[17]。按照现有的降功率速度水平,降功率方案的时序配合逻辑可表示为附录A中图A10所示。1.0 s时,送端换流站单极闭锁。1.002 s时,送端换流站投入5000 MW交流泄能电阻。1.15 s时,所有光伏场站接收到指令,通过200 ms将功率降低一半。当注入送端换流站母线的功率降低到5000 MW时,控制系统分组退出交流泄能电阻,每次退出1组,间隔时间为20 ms。
采用新能源降功率方案时的仿真结果如附录A中图A11所示。1.15 s时,各新能源场站开始降功率,流入健全极换流站的有功电流快速下降,送端换流站母线交流电压不断降低,最低降至471 kV。降功率过程结束后,泄能电阻开始分组退出。此时,在控制器饱和与泄能电阻快速退出的双重作用下,送端交流母线出现659 kV的过电压。在该过程中,送端换流站交流母线电压依然表现出先低后高序贯波动的特征,但由于降功率速度的降低,相较于切机过程系统低电压程度有所减小。值得注意的是,降功率方案下受端系统将承受功率缺额持续时间更长,会给受端电网的频率造成更大的冲击。
下面在降功率方案的基础上对控制器饱和特性进行研究。本部分MMC内外环控制器均采用图A4所示的含积分抗饱和控制的PI控制器。同时,为避免单极闭锁期间d轴电流指令值反向,单极闭锁后将MMC外环PI控制器d轴电流的上限幅值改为0,下限幅值保持不变。单极闭锁、泄能电阻投退、新能源降功率等各扰动的时序与降功率方案保持一致,所得结果如附录A中图A12所示。对比图A11和图A12可以看出,在采用积分抗饱和控制以后,送端交流母线的低电压水平仍为471 kV,但送端交流母线的过电压水平从659 kV降低到604 kV,内环控制器退出饱和的时间将明显降低。仿真结果表明,内环控制器饱和对过电压的程度具有较大的影响,采用积分抗饱和控制后可以缓解系统的过电压水平。但值得指出的是,采用积分抗饱和控制仅能部分缓解由于内环控制器饱和带来的过电压,但系统的低电压问题以及泄能电阻快速退出带来的过电压问题依然存在,同时受端电网的频率仍会因功率缺额受到较大的冲击。
3)方案3,降功率与泄能电阻退出相配合的方案。
首先确定故障处理策略的关键参数。故障前的双极功率为10000 MW、MMC单极传输的最大功率为5000 MW,根据式(16)计算出投入泄能电阻的组数为10组。送端新能源电网所需降低的总功率为5000 MW,根据式(17)计算出各新能源场站分配的降功率份额分别为各自初始功率的50%。接着根据单组泄能电阻的容量、测量时间延时,通过式(20)计算出新能源降功率速度vcri1为2.5 pu/s。根据2.4.2节分析,当泄能电阻退出速度在2.5 pu/s以下时,系统电压上升幅度维持在5%以内且不再随泄能电阻退出速度发生明显变化,故新能源降功率的速度vcri2为2.5 pu/s。因此,根据式(21),降功率的最大速度vmax为2.5 pu/s,即新能源通过200 ms将功率降低至50%。
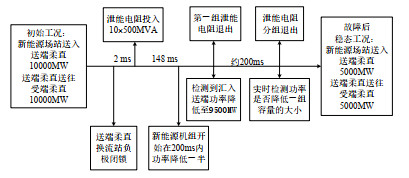
根据上述计算的参数得到本文所提的方案时序配合逻辑如附录A图A13所示。1.15 s时,所有光伏场站接收到指令,利用200 ms将功率降低一半。泄能电阻控制系统在检测到汇入送端换流站母线的功率降低到9500 MW时退出第1组,此后每当检测到注入送端换流站母线的功率降低1组泄能电阻的容量(即500 MW)时,退出1组泄能电阻,直至全部退出。
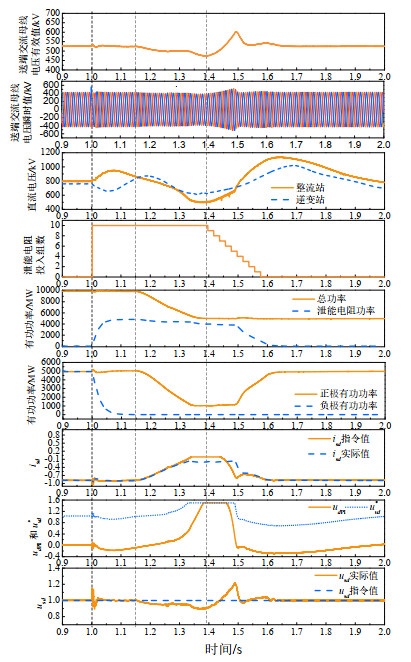
采用方案3时的仿真结果如附录A中图A14所示。1.15 s时,所有光伏场站开始降功率。1.17 s时,光伏场站总功率降低500 MW,泄能电阻退出1组的容量。此后送端光伏场站总功率每降低500 MW,泄能电阻随之退出1组。从图A14可以看出,单极闭锁期间注入健全极换流站的有功电流没有发生大范围的波动,送端换流站母线交流电压始终保持在515 ~536 kV之间,未出现明显的低电压和过电压现象。同时,与前述2类方案对比,单极闭锁期间流入送端健全极换流站的功率最低仅降低至4000 MW,受端系统承受的功率缺额大幅降低。仿真结果表明,所提方案能够明显改善系统的电压问题,防止系统在单极闭锁后出现交流电压的序贯波动,同时减少对受端电网的频率冲击。
5. 结论
本文研究了大规模新能源基地柔性直流送出系统单极闭锁过程中由新能源切机/降功率及泄能电阻投退等系列扰动引起的交流电压序贯波动问题,主要结论如下:
1)建立了适用于分析柔性直流主导的送端电网交流电压序贯波动问题的数学模型,包含MMC交流侧电路动态模型以及MMC的VF控制器模型。
2)明确了送端系统交流电压序贯波动的机理。新能源快速切机/降功率带来的注入送端换流站有功功率的迅速降低是引起送端交流母线低电压的原因。新能源切机/降功率期间低电压带来的d轴内环控制器饱和以及泄能电阻的快速退出是引起送端交流母线过电压的原因。
3)分析了关键参数对交流电压序贯波动情况的影响。在送端换流站单极闭锁泄能电阻投入后,新能源降功率速度越慢,交流电压的跌幅就会越小;泄能电阻退出速度越慢,交流电压的升高程度越小。
4)本文提出的新能源降功率与泄能电阻退出相协调的单极闭锁故障穿越策略,操作简单,工程可实现性强,仿真结果表明能够有效避免系统单极闭锁过程中交流电压的序贯波动。
附录见本刊网络版(http://www.dwjs.com.cn/CN/1000- 3673/current.shtml)。
附录A
![]() A2 降功率所用时间与最低电压的关系A2. Relationship between the time used for power reduction and the minimum voltage
A2 降功率所用时间与最低电压的关系A2. Relationship between the time used for power reduction and the minimum voltage![]() A3 泄能电阻退出所用时间与最高电压的关系A3. Relationship between the rate of withdrawal of energy-consuming resistors and the degree of AC voltage riseA1 系统参数A1. System parameters
A3 泄能电阻退出所用时间与最高电压的关系A3. Relationship between the rate of withdrawal of energy-consuming resistors and the degree of AC voltage riseA1 系统参数A1. System parameters类别 项目 取值 基本参数 双极额定容量/MW 10000 额定直流电压/kV ±800 额定直流电流/kA 6.25 PCC交流电压有效值/kV 525 MMC参数 额定容量/MW 2500 直流电压/kV 400 子模块电容/mF 45 桥臂电抗/mH 11 MMC
换流变变比/(kV/kV) 525/264 容量/MVA 2800 漏抗/pu 0.18 直流线路参数 线路长度/km 2000 交流线路参数 单位长度电阻/(pu/m) 4.67×10−9 单位长度电感/(pu/m) 9.533×10−8 单位长度电容/(pu/m) 1.186×10−5 线路长度/km 50 泄能电阻
支路换流变变比/(kV/ kV) 525/66 容量/MVA 3000 组数/组 2 漏抗/pu 0.2 送端交流
泄能装置额定功率(单组)/MW 500 联结方式 三角形 单次最大允许投入时间/s 1.5 泄能电阻组数/组 10 光伏参数 单台光伏有功功率/MW 20.8 各场站倍乘数 79、79、79、
117、117![]() A7 稳控切机方案时序配合逻辑A7. Sequential coordination logic for generator cutting by stability control device
A7 稳控切机方案时序配合逻辑A7. Sequential coordination logic for generator cutting by stability control device![]() A8 采用稳控切机方案时系统的动态特性A8. Dynamic characterization of systems with a generator cutting scheme
A8 采用稳控切机方案时系统的动态特性A8. Dynamic characterization of systems with a generator cutting scheme![]() A9 采用修改的稳控切机方案时系统的动态特性A9. Dynamic characterization of systems with a modified generator cutting scheme
A9 采用修改的稳控切机方案时系统的动态特性A9. Dynamic characterization of systems with a modified generator cutting scheme![]() A10 新能源降功率方案时序配合逻辑A10. Sequential coordination logic for renewable energy reducing power
A10 新能源降功率方案时序配合逻辑A10. Sequential coordination logic for renewable energy reducing power![]() A11 采用降功率方案时系统的动态特性A11. Dynamic characterization of systems with power reduction scheme
A11 采用降功率方案时系统的动态特性A11. Dynamic characterization of systems with power reduction scheme![]() A12 采用积分抗饱和控制后降功率方案的系统动态特性A12. Dynamic characterization of systems with power reduction scheme after using integral antisaturation control
A12 采用积分抗饱和控制后降功率方案的系统动态特性A12. Dynamic characterization of systems with power reduction scheme after using integral antisaturation control![]() A13 降功率与泄能退出相协调的时序配合逻辑A13. Sequential coordination logic for harmonizing power reduction with energy consumption exit
A13 降功率与泄能退出相协调的时序配合逻辑A13. Sequential coordination logic for harmonizing power reduction with energy consumption exit![]() A14 采用本文所提方案时系统的动态特性A14. Dynamic characterization of systems using the scheme proposed in this paper
A14 采用本文所提方案时系统的动态特性A14. Dynamic characterization of systems using the scheme proposed in this paper附录B
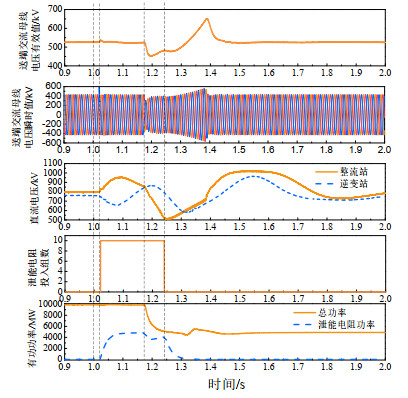
本文虽然是针对本拓扑送端换流站单极闭锁进行研究的,但所得结论对于受端换流站单极闭锁的情况也是同样适用的。这是因为对于本文所研究的拓扑结构,受端换流站采用定直流电压控制,当其发生单极闭锁故障后,受端换流站会迅速投入直流泄能电阻,平衡掉盈余的直流功率。但此时由于故障极失去了受端的定直流电压站,故障极送端换流站的直流电压失去支撑,系统无法稳定运行,送端换流站也会进行闭锁操作。此时,对于送端电网而言,依然相当于发生了单极闭锁故障,随之而来的送端泄能电阻、送端稳控切机装置会按照送端单极闭锁的场景进行动作。针对本文所研究的拓扑,仿真了受端单极闭锁故障后系统的动态。1.0 s时,受端端换流站负极闭锁,受端换流站立即投入直流泄能电阻。1.02 s时,送端换流站收到受端单极闭锁的信号,并将自身闭锁。1.022 s时,送端换流站投入5000 MW交流泄能电阻。1.17 s时,新能源场站侧稳控装置接收到单极闭锁信号,于光伏场站1、光伏场站2、光伏场站3的并网点切除共计5000 MW的新能源机组。1.22 s时,控制系统集中退出所有交流泄能电阻。仿真波形如A10所示。从图中可以看出,送端系统交流电压的响应特性与送端换流站发生单极闭锁时基本相同,依然会出现交流电压的序贯波动。
![]() B1 受端换流站单极闭锁时系统的动态特性B1. Dynamic characterization of the system during mono-polar blocking process at the receiving end converter station
B1 受端换流站单极闭锁时系统的动态特性B1. Dynamic characterization of the system during mono-polar blocking process at the receiving end converter station -
![]()
图 1 大规模新能源基地经柔性直流送出系统示意图
Figure 1. Schematic diagram of large-scale renewable energy base transmission by VSC-HVDC
![]()
图 4 单极闭锁时送端电网功率流向
Figure 4. Power flow diagram of the grid at the sending end during mono-polar blocking process
![]()
图 7 盈余功率实际值、测量值之间的关系示意图
Figure 7. Schematic diagram of the relationship between actual and measured values of surplus power
![]()
A2 降功率所用时间与最低电压的关系
A2. Relationship between the time used for power reduction and the minimum voltage
![]()
A3 泄能电阻退出所用时间与最高电压的关系
A3. Relationship between the rate of withdrawal of energy-consuming resistors and the degree of AC voltage rise
![]()
A7 稳控切机方案时序配合逻辑
A7. Sequential coordination logic for generator cutting by stability control device
![]()
A8 采用稳控切机方案时系统的动态特性
A8. Dynamic characterization of systems with a generator cutting scheme
![]()
A9 采用修改的稳控切机方案时系统的动态特性
A9. Dynamic characterization of systems with a modified generator cutting scheme
![]()
A10 新能源降功率方案时序配合逻辑
A10. Sequential coordination logic for renewable energy reducing power
![]()
A11 采用降功率方案时系统的动态特性
A11. Dynamic characterization of systems with power reduction scheme
![]()
A12 采用积分抗饱和控制后降功率方案的系统动态特性
A12. Dynamic characterization of systems with power reduction scheme after using integral antisaturation control
![]()
A13 降功率与泄能退出相协调的时序配合逻辑
A13. Sequential coordination logic for harmonizing power reduction with energy consumption exit
![]()
A14 采用本文所提方案时系统的动态特性
A14. Dynamic characterization of systems using the scheme proposed in this paper
![]()
B1 受端换流站单极闭锁时系统的动态特性
B1. Dynamic characterization of the system during mono-polar blocking process at the receiving end converter station
A1 系统参数
A1 System parameters
类别 项目 取值 基本参数 双极额定容量/MW 10000 额定直流电压/kV ±800 额定直流电流/kA 6.25 PCC交流电压有效值/kV 525 MMC参数 额定容量/MW 2500 直流电压/kV 400 子模块电容/mF 45 桥臂电抗/mH 11 MMC
换流变变比/(kV/kV) 525/264 容量/MVA 2800 漏抗/pu 0.18 直流线路参数 线路长度/km 2000 交流线路参数 单位长度电阻/(pu/m) 4.67×10−9 单位长度电感/(pu/m) 9.533×10−8 单位长度电容/(pu/m) 1.186×10−5 线路长度/km 50 泄能电阻
支路换流变变比/(kV/ kV) 525/66 容量/MVA 3000 组数/组 2 漏抗/pu 0.2 送端交流
泄能装置额定功率(单组)/MW 500 联结方式 三角形 单次最大允许投入时间/s 1.5 泄能电阻组数/组 10 光伏参数 单台光伏有功功率/MW 20.8 各场站倍乘数 79、79、79、
117、117 下载: 导出CSV
下载: 导出CSV
-
[1] 康重庆, 杜尔顺, 郭鸿业, 等. 新型电力系统的六要素分析[J]. 电网技术, 2023, 47(5): 1741-1750. DOI: 10.13335/j.1000-3673.pst.2023.0535 KANG Chongqing, DU Ershun, GUO Hongye, et al. Primary exploration of six essential factors in new power system[J]. Power System Technology, 2023, 47(5): 1741-1750(in Chinese). DOI: 10.13335/j.1000-3673.pst.2023.0535
[2] 国家发展改革委, 国家能源局. "十四五"可再生能源发展规划[EB/OL]. (2022-06-01)[2023-11-16]. https://www.ndrc.gov.cn/xxgk/zcfb/ghwb/202206/t20220601_1326719.html?code=&state=123. [3] KALAIR A, ABAS N, KHAN N. Comparative study of HVAC and HVDC transmission systems[J]. Renewable and Sustainable Energy Reviews, 2016, 59: 1653-1675. DOI: 10.1016/j.rser.2015.12.288
[4] 徐政, 张哲任, 徐文哲. LCC-MMC串联混合型直流输电拓扑在大规模纯新能源发电基地送出中的应用研究[J]. 电力电容器与无功补偿, 2022, 43(3): 119-126. XU Zheng, ZHANG Zheren, XU Wenzhe. Research on application of LCC-MMC series hybrid HVDC topology for large scale clean energy base integration[J]. Power Capacitor & Reactive Power Compensation, 2022, 43(3): 119-126(in Chinese).
[5] 徐政, 肖晃庆, 张哲任, 等. 柔性直流输电系统[M]. 2版. 北京: 机械工业出版社, 2017. [6] 徐政. 海上风电送出主要方案及其关键技术问题[J]. 电力系统自动化, 2022, 46(21): 1-10. DOI: 10.7500/AEPS20220603001 XU Zheng. Main schemes and key technical problems for grid integration of offshore wind farm[J]. Automation of Electric Power Systems, 2022, 46(21): 1-10(in Chinese). DOI: 10.7500/AEPS20220603001
[7] 樊肖杰, 迟永宁, 马士聪, 等. 大规模海上风电接入电网关键技术与技术标准的研究及应用[J]. 电网技术, 2022, 46(8): 2859-2870. DOI: 10.13335/j.1000-3673.pst.2021.2317 FAN Xiaojie, CHI Yongning, MA Shicong, et al. Research and application of key technologies and technical standards for large-scale offshore wind farms connecting to power grid[J]. Power System Technology, 2022, 46(8): 2859-2870(in Chinese). DOI: 10.13335/j.1000-3673.pst.2021.2317
[8] 刘泽洪, 郭贤珊. 含新能源接入的双极柔性直流电网运行特性研究与工程实践[J]. 电网技术, 2020, 44(9): 3595-3603. DOI: 10.13335/j.1000-3673.pst.2020.0254a LIU Zehong, GUO Xianshan. Operating characteristics research and engineering application of voltage source converter based DC grid with renewable source connected [J]. Power System Technology, 2020, 44(9): 3595-3603 (in Chinese). DOI: 10.13335/j.1000-3673.pst.2020.0254a
[9] 徐政, 薛英林, 张哲任. 大容量架空线柔性直流输电关键技术及前景展望[J]. 中国电机工程学报, 2014, 34(29): 5051-5062. XU Zheng, XUE Yinglin, ZHANG Zheren. VSC -HVDC technology suitable for bulk power overhead line transmission[J]. Proceedings of the CSEE, 2014, 34(29): 5051-5062(in Chinese).
[10] 骆悦, 姚骏, 张田, 等. 大规模风电直流外送系统单极闭锁场景下送端系统协调控制策略[J]. 电工技术学报, 2019, 34(19): 4108-4118. LUO Yue, YAO Jun, ZHANG Tian, et al. Coordinated control strategy of large-scale wind power generation sending system under mono-polar block fault[J]. Transactions of China Electrotechnical Society, 2019, 34(19): 4108-4118(in Chinese).
[11] 郭贤珊, 梅念, 李探, 等. 张北柔性直流电网盈余功率问题的机理分析及控制方法[J]. 电网技术, 2019, 43(1): 157-164. DOI: 10.13335/j.1000-3673.pst.2018.1643 GUO Xianshan, MEI Nian, LI Tan, et al. Study on solution for power surplus in Zhangbei VSC-based DC grid mechanism analysis and control method[J]. Power System Technology, 2019, 43(1): 157-164(in Chinese). DOI: 10.13335/j.1000-3673.pst.2018.1643
[12] 赵悦彤, 王姗姗, 赵兵, 等. 直流电网暂态过电压机理与抑制策略[J]. 电力建设, 2020, 41(9): 86-93. ZHAO Yuetong, WANG Shanshan, ZHAO Bing, et al. Study on the mechanism and suppressed strategy of transient over-voltage in DC power grid[J]. Electric Power Construction, 2020, 41(9): 86-93(in Chinese).
[13] 蔡希鹏, 黄伟煌, 李桂源, 等. 大规模光伏集群经柔性直流构网送出的运行控制技术研究[J]. 中国电机工程学报, 2023, 43(22): 8734-8744. CAI Xipeng, HUANG Weihuang, LI Guiyuan, et al. Research on operation control strategy of large-scale photovoltaic cluster transmission via grid-forming VSC-HVDC[J]. Proceedings of the CSEE, 2023, 43(22): 8734-8744(in Chinese).
[14] 高丙团, 胡正阳, 王伟胜, 等. 新能源场站快速有功控制及频率支撑技术综述[J/OL]. 中国电机工程学报, 2023: 1-16[2023-10-18]. http://kns.cnki.net/kcms/detail/11.2107.TM.20230530.1551.003.html. GAO Bingtuan, HU Zhengyang, WANG Weisheng, et al. Review on fast active power control and frequency support technologies of renewable energy stations[J/OL]. Proceedings of the CSEE, 2023: 1-16 [2023-10-18]. http://kns.cnki.net/kcms/detail/11.2107.TM.20230530.1551.003.html(in Chinese).
[15] 卢宇, 汪楠楠, 刘鹏, 等. 采用交流耗能的新能源孤岛柔直送出方案及仿真研究[J]. 电气技术, 2022, 23(5): 18-24. DOI: 10.3969/j.issn.1673-3800.2022.05.003 LU Yu, WANG Nannan, LIU PENG, et al. Study on the scheme of islanded renewable energy delivered by VSC-HVDC using alternating current chopper[J]. Electrical Engineering, 2022, 23(5): 18-24(in Chinese). DOI: 10.3969/j.issn.1673-3800.2022.05.003
[16] 张福轩, 郭贤珊, 汪楠楠, 等. 接入新能源孤岛系统的双极柔性直流系统盈余功率耗散策略[J]. 电力系统自动化, 2020, 44(5): 154-160. ZHANG Fuxuan, GUO Xianshan, WANG Nannan, et al. Surplus power dissipation strategy for bipolar VSC-HVDC system with integration of islanded renewable energy generation system[J]. Automation of Electric Power Systems, 2020, 44(5): 154-160(in Chinese).
[17] 江守其, 李国庆, 辛业春, 等. 提升柔性直流电网盈余功率消纳能力的协调控制策略[J]. 高电压技术, 2021, 47(12): 4471-4482. JIANG Shouqi, LI Guoqing, XIN Yechun, et al. Coordinated control strategies to enhance the capability of surplus power consumption for DC grid[J]. High Voltage Engineering, 2021, 47(12): 4471-4482(in Chinese).
[18] 贺静波, 庄伟, 许涛, 等. 暂态过电压引起风电机组连锁脱网风险分析及对策[J]. 电网技术, 2016, 40(6): 1839-1844. DOI: 10.13335/j.1000-3673.pst.2016.06.034 HE Jingbo, ZHUANG Wei, XU Tao, et al. Study on cascading tripping risk of wind turbines caused by transient overvoltage and its countermeasures[J]. Power System Technology, 2016, 40(6): 1839-1844(in Chinese). DOI: 10.13335/j.1000-3673.pst.2016.06.034
[19] AKAGI H, WATANABE E H, AREDES M. 瞬时功率理论及其在电力调节中的应用[M]. 徐政, 译. 北京: 机械工业出版社, 2009: 34-89. [20] 张楠, 徐政, 张哲任. LCC-FHMMC混合直流输电系统受端交流系统故障穿越控制策略[J]. 电力自动化设备, 2023, 43(4): 39-45, 53. ZHANG Nan, XU Zheng, ZHANG Zheren, et al. Receiving-end AC system fault ride-through control strategy of LCC-FHMMC hybrid HVDC transmission system[J]. Electric Power Automation Equipment, 2023, 43(4): 39-45, 53(in Chinese).
[21] 薛翼程, 王国腾, 张哲任, 等. MMC-HVDC接入对同步发电机阻尼转矩的影响机理分析[J]. 电力系统自动化, 2022, 46(9): 99-108. XUE Yicheng, WANG Guoteng, ZHANG Zheren, et al. Mechanism analysis of influence of MMC-HVDC integration on damping torque of synchronous generators[J]. Automation of Electric Power Systems, 2022, 46(9): 99-108(in Chinese).
[22] 胡家兵, 袁小明, 程时杰. 电力电子并网装备多尺度切换控制与电力电子化电力系统多尺度暂态问题[J]. 中国电机工程学报, 2019, 39(18): 5457-5467. HU Jiabing, YUAN Xiaoming, CHENG Shijie. Multi-time scale transients in power-electronized power systems considering multi- time scale switching control schemes of power electronics apparatus [J]. Proceedings of the CSEE, 2019, 39(18): 5457-5467(in Chinese).
[23] 杨明, 徐殿国, 贵献国. 控制系统Anti-Windup设计综述[J]. 电机与控制学报, 2006, 10(6): 622-626, 631. DOI: 10.3969/j.issn.1007-449X.2006.06.018 YANG Ming, XU Dianguo, GUI Xianguo. Review of control system Anti-Windup design[J]. Electric Machines and Control, 2006, 10(6): 622-626, 631(in Chinese). DOI: 10.3969/j.issn.1007-449X.2006.06.018
[24] 国家市场监督管理总局, 国家标准化管理委员会. 电力系统安全稳定导则: GB 38755—2019[S]. 北京: 中国标准出版社, 2019. [25] 毛永恒, 高丙团, 胡正阳, 等. 计及双馈机组直流卸荷的风电场紧急降功率控制策略[J]. 中国电机工程学报, 2023, 43(S1): 70-83. MAO Yongheng, GAO Bingtuan, HU Zhengyang, et al. Emergency power reduction control strategy of wind farm considering DC chopper of doubly-fed induction generator[J]. Proceedings of the CSEE, 2023, 43(S1): 70-83(in Chinese).
计量
- 文章访问数: 0
- HTML全文浏览量: 0
- PDF下载量: 0
 下载:
下载:



